Force Sensing
During contact with an object, external forces deform the skin and fluid path around the electrodes, resulting in a non-linear distributed pattern of impedance changes containing information about force magnitude, direction, point of contact and object shape. Dynamic ranges of force sensing and resultant impedances span about a factor of 1000 as a result of asperities molded into the inner surface of the skin. Sensing range depends on fill volume, rubber durometer and asperity geometry; resolution (~0.01N) is limited by sampling electronics. Tangential forces result in sliding of the skin, causing a distributed pattern of impedance changes in electrodes along the sides of the finger. Non-linear regression techniques are required to interpret the data if explicit force vectors are to be extracted. We have used several machine learning techniques to explore data extraction including Kalman filters, neural networks, Gaussian processes and support vector machines.
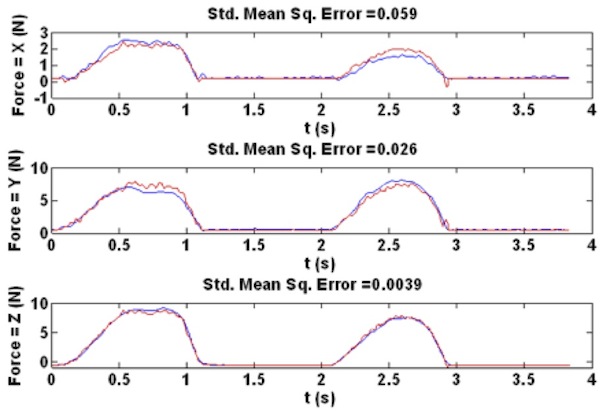 Predicted (red) force vectors (Z = normal, X, Y = tangential) compared to actual forces (blue) for two of a set of manual contacts with the BioTAC. More systematic datasets for regression and validation are now being generated by contact with various probes controlled by a stepper-motor.
Predicted (red) force vectors (Z = normal, X, Y = tangential) compared to actual forces (blue) for two of a set of manual contacts with the BioTAC. More systematic datasets for regression and validation are now being generated by contact with various probes controlled by a stepper-motor.